Interactive Visualization for DexterCap
1 Peking University2 Tencent Robotics X
Interactive Visualization
Click to load interactive visualization.
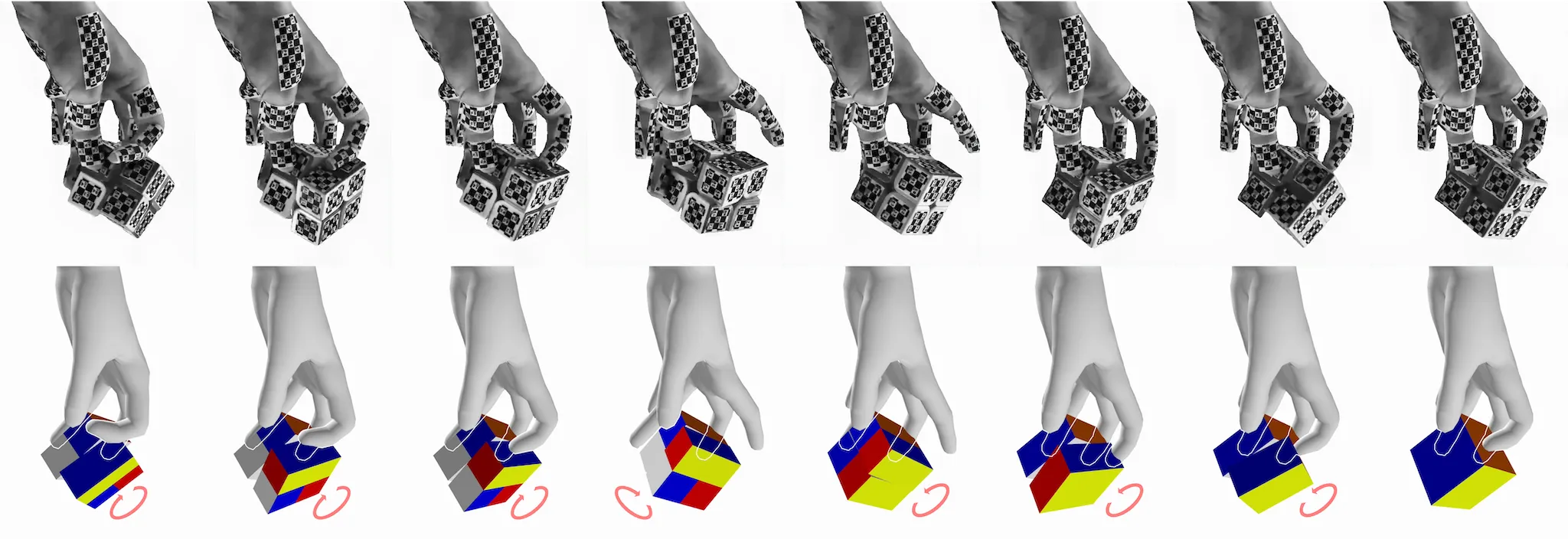
Gallery
BibTeX
If you find DexterCap useful in your research, please consider citing:
@article{liang2026dextercap,
title={DexterCap: An Affordable and Automated System for Capturing Dexterous Hand-Object Manipulation},
author={Yutong Liang and Shiyi Xu and Yulong Zhang and Bowen Zhan and He Zhang and Libin Liu},
journal={arXiv preprint arXiv:2601.05844},
year={2026}
}